
ブログ





06/05(木)3j 講師のひとりごと
2025.07.20
坂下教室
本日のテーマは「四足歩行ロボット①」です。
ここではスタンダードコースの「マニピュレーター」で習ったリンク機構についての応用です。
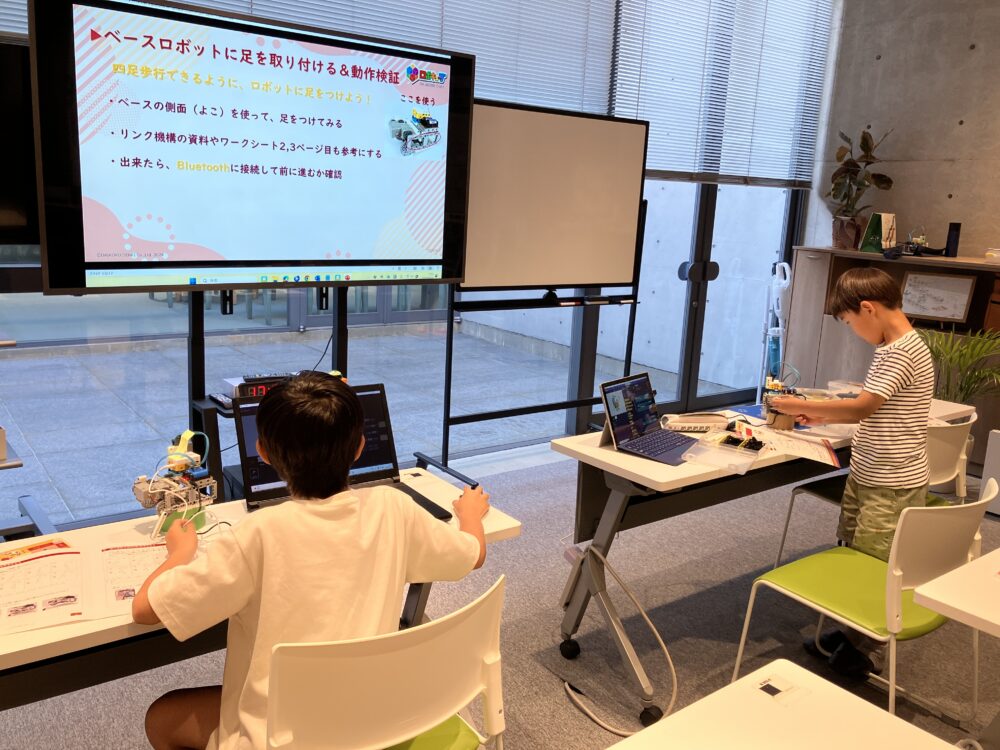
TECCubicを使い並行リンク、チェビシェフリンク、てこクランク機構の動きを見せ、
リンク機構の作り方を改めて習いました。
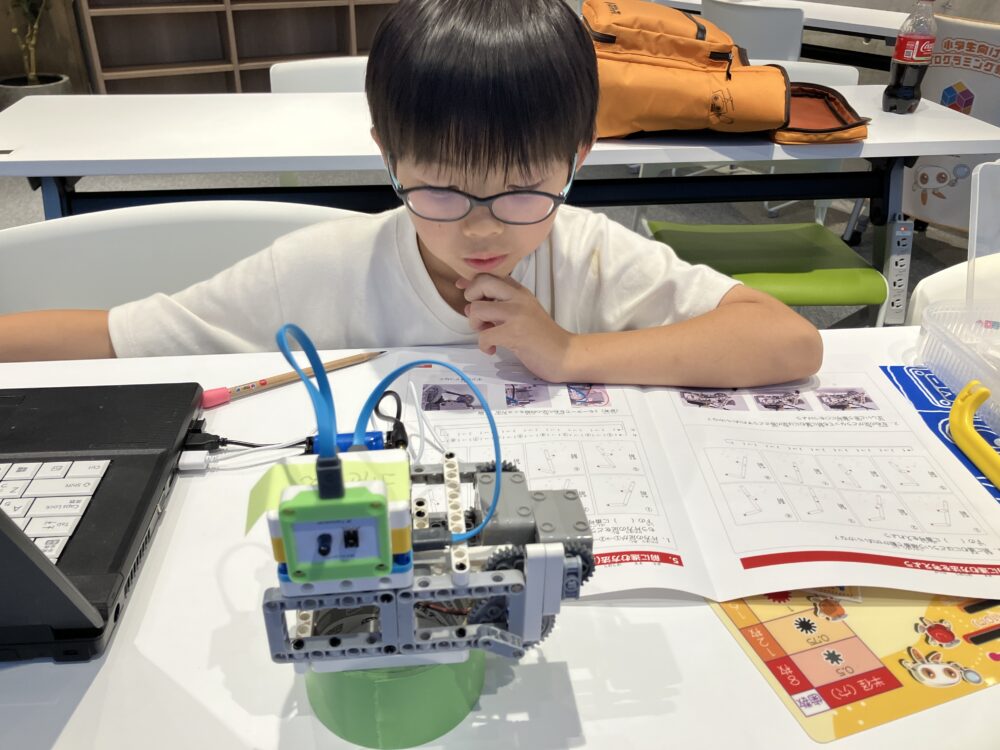
リンク同士が交差しないように3次元で構造を考えないといけないのがポイント!!

授業後は元気よくクッションで遊んでからのご帰還したけど、
家でどんな四足の脚を作ってくるのか楽しみです(^^♪
ブログ一覧に戻る
school
教室ごとに見る



